


Micro Six Dimensional Force Sensor Photon Finger
In 2024, Haptron Scientific unveiled the Photon Finger, currently recognized as the world's smallest optically-based six-dimensional force sensor. For the first time, the size of a multi-dimensional force sensor has been reduced to the millimeter scale, overcoming the long-standing industry challenge of miniaturizing force sensors. The Photon Finger has a diameter of only 8.5mm and a thickness of 7mm. Thanks to its miniature size, it has successfully enabled the integration of a high-precision six-dimensional force sensor into robotic fingertips, addressing the critical issue of the lack of fingertip force sensing that has hindered the practical application of humanoid robots.
Classification:
Force and torque sensor
Key words:
Micro Six Dimensional Force Sensor Photon Finger
Product Consulting
- Product Description
- Product features
- Technical parameters of the product
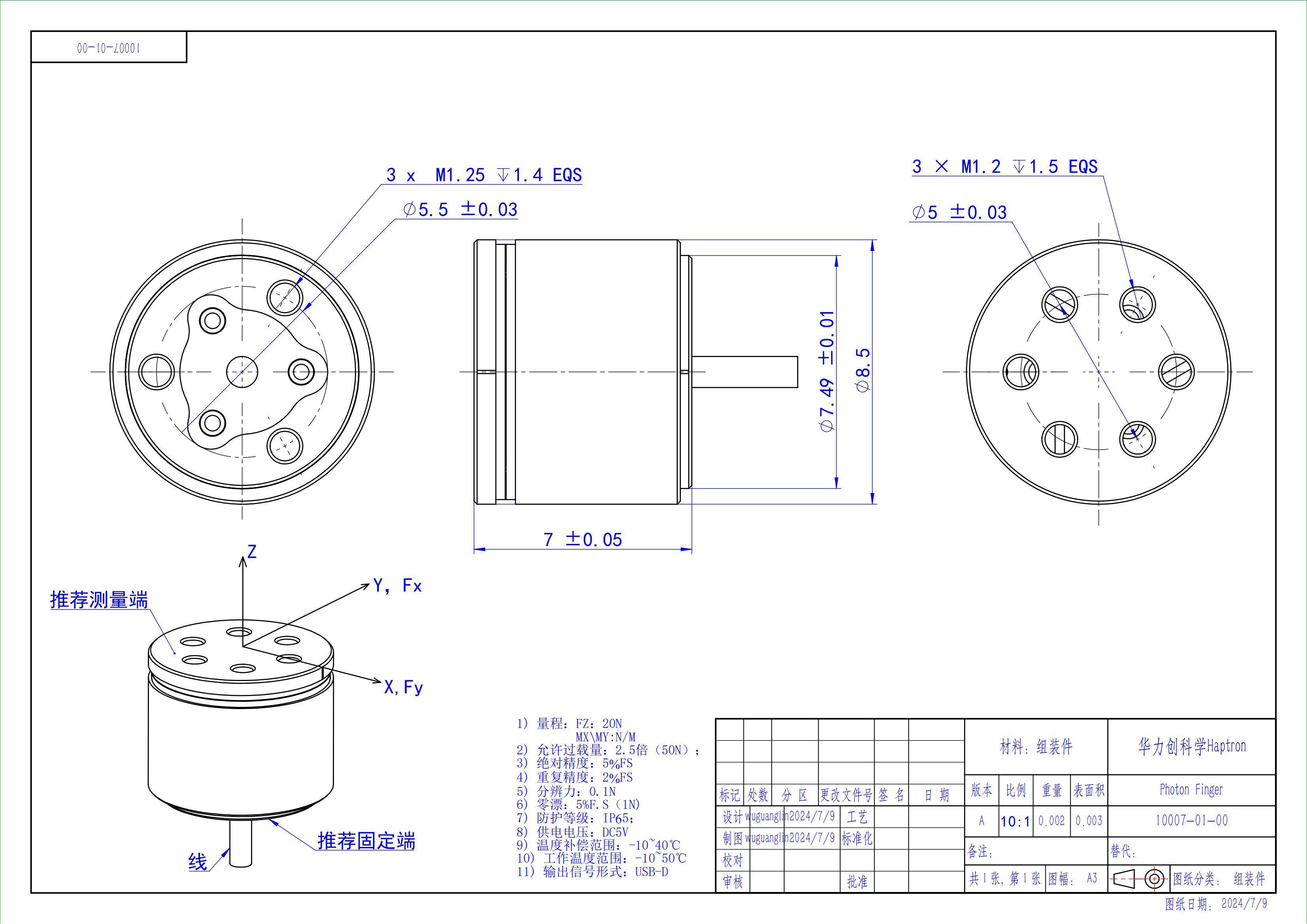
- Structure diagram of the product
- Sample code
-
In 2024, Haptron Scientific unveiled the Photon Finger, currently recognized as the world's smallest optically-based six-dimensional force sensor. For the first time, the size of a multi-dimensional force sensor has been reduced to the millimeter scale, overcoming the long-standing industry challenge of miniaturizing force sensors. The Photon Finger has a diameter of only 8.5mm and a thickness of 7mm. Thanks to its miniature size, it has successfully enabled the integration of a high-precision six-dimensional force sensor into robotic fingertips, addressing the critical issue of the lack of fingertip force sensing that has hindered the practical application of humanoid robots.
-
1. Currently known as the smallest in size worldwide, with a diameter of only 8.5mm and a thickness of 7mm.
2. High performance, high sensitivity, and a wide range of measurement capabilities.
3. Communication frequency at the kilohertz level.
4. Power consumption <0.1W.
5. Resistant to high temperatures and strong magnetic fields.
-
Technical parameters/Technical Parameters Range Fz : 60N
Fx=Fy : 20N
Mx=My : 0.07NmOverload 250%F.S Repeatability 1%F.S Resolution 0.05N Zero Drift 0.5%F.S Protection Rating IP65 Supply Voltage DC 24V Temperature Compensation -10℃ ~40℃ Operating Temperature -10℃ ~50℃ Output Signal RS485/ Others Sampling Frequency 1000Hz -
-
#include <chrono>
#include "sensor_connector/sensor_connector.h"
#include "sensor_connector/method.h"
#ifdef _WIN32
#include <windows.h>
#define imsleep(microsecond) Sleep(microsecond) // ms
#else
#include <unistd.h>
#define imsleep(microsecond) usleep(1000 * microsecond) // ms
#endif
std::string GetTimeStamp()
{
auto timeNow = std::chrono::duration_cast<std::chrono::milliseconds>(std::chrono::system_clock::now().time_since_epoch());
long timestamp = timeNow.count();
return std::to_string(timestamp);
}
int main(int argc, const char** argv)
{
haptron::ConnectorConfig sc;
sc.sensor_type = haptron::SensorType::Photon_FINGER;
sc.com_pro = haptron::CommucationProtocol::Serial;
sc.port = std::string("/dev/ttyACM0");
haptron::SensorConnector sensor_connector(sc);
float fx, fy, fz, mx, my, mz = 0.0;
bool ret = sensor_connector.connect();
if(!ret){
return -1;
}
while (true)
{
sensor_connector.get_data(fx, fy, fz, mx, my, mz);
// auto timeNow = std::chrono::duration_cast<std::chrono::milliseconds>(std::chrono::system_clock::now().time_since_epoch());
// long timestamp = timeNow.count();
std::cout << "Time Stamped: " << GetTimeStamp() << std::endl;
haptron::photon_finger_decouple(0.0, 0.0, 0.005, fz, mx, my, fx, fy);
printf("Sensor data: %6.4f, %6.4f, %6.4f, %6.4f, %6.4f, %6.4f.\n", fx, fy, fz, mx, my, mz);
imsleep(10);
}
sensor_connector.close();
return 0;
}
Related Products

Micro Six Dimensional Force Sensor Photon Finger
Learn more>
Photon_micro Series Medical Force Sensor
Learn more>
Industrial grade six axis force sensor PhotonR40
Learn more>
PhotonR66 six-dimensional force sensor
Learn more>
Product Consulting
National Service Hotline
Website: www.haptron-scientific.com
Address: 2101, Block B, Building 1, Smart Home, No.76 Baohe Avenue, Baolong Community, Baolong Street, Longgang District, Shenzhen City, Guangdong Province